
3·
2 years agoSymfonium is great, it supports a bunch of sources and works really well. Absolutely worth supporting the dev (check his ko-fi too)!
Symfonium is great, it supports a bunch of sources and works really well. Absolutely worth supporting the dev (check his ko-fi too)!
Oh okay that’s a lot of power. For reference, I just set up an old Haswell PC as a NAS, idling at 25W (can’t get to low Package C states) and usually at 28-30 running light workloads on an SSD pool. My plan was to add a 5 disk cage and at least 3 HDDs, with Raidz2 and 5 disks being the mid term goal. Absolutely unnecessary and a huge waste. I settled on less but larger disks, and in mirror I can get 12-18 TB usable space for under 500€. Less noise and power draw too.
Look for 5W idle consumption boards + CPU combos which go down to package C6+ state. HardwareLuxx has a spreadsheet with various builds focusing on low power. Sell half your disks, go mirror or Raidz1. Invest the difference in off-site vps and or backup. Storage on any SBC is a big pain and you will hit the sata connector / IO limits very soon.
The small NUC form factors are also fine, but if your problem is power you can go very low with a good approach and the right parts. And you’ll make up for any new investments within the first year.
The problem is, the libraries and SDK used to build the app will have had vulnerabilities for sure. Same for the underlying image (unless scratch / distroless). We run extensive vulnerability scanning in our pipelines, and Go libs occasionally pop up. The Go SDK also had multiple security fixes in the last year.
For the physical hosts / bare metal I use fluentbit, with Loki as the backend. Grafana for visualization and alerts. This gives me utilization metrics and uptime monitoring. The app containers themselves I do not monitor.
How does this work, some loophole or a business customer? You can drop some info in a private message if you don’t f feel like posting in public. Re server part deals, I am not sure if this is always the case, but the current selection of disks is 90% helium (Exos etc) HDDs, a few IronWolfs which are too large (20TB) and basically that’s it. My DIY NAS is unfortunately in the apartment and I’m reluctant to try He disks due to the intensive sound profile.
I wish this was an option for Europe. Once you slap VAT and shipping, you end up paying more than for new disks. :(
Wifi pretty much excludes k*s and I assume that swarm and Nomad would be impacted by blips in the wireless connectivity. You can try how things work out with a load balancer / reverse proxy on a wired connection, which then checks the downstream services and routes the request to available instances.
Please look into Wifi-specific issues related to the various orchestration platforms before deciding to try one out. Hypervisor is usually a win win, until you try to do failover.
I wasn’t intending on doing this, instead opting to install Pi-hole, Log2Ram, UFW, and the… other… softwares directly to the OS for simplicity. Why would one set up a Pi-hole et al in a containers instead of directly?
So there are many reasons, and this is something I nowadays almost always do. But keep in mind that some of us have used Docker for our applications at work for over half a decade now. Some of these points might be relevant to you, others might seem or be unimportant.
Basically I have a very simple host setup with only a few packages installed. Then I would remotely configure and start up my containers, expose ports etc. And I can cleanly define where my configuration is, back up only that particular folder for example and keep the rest of the setup easy to redeploy.
If you want to try setting it up in high availability with failover, give me a poke. And until then - go to Teleporter in the settings, and download the backup. You can restore from there.
One thing worth saying is this - you can grab a cheap refurbished ssd (the smaller - the better), check it’s SMART data for any red flags, and attach it to the pi as OS disk. It will be much more reliable than SD, but overkill if you only run pi on the box. Alternatively look into log2ram, it keeps your SD card alive for longer :D but backup first!
The best test I have is my wife complaining, that ads in Google results cannot be opened. It seems to work flawlessly for me 😂
On a more serious note, what tests are these? The thing is, the ad domain is either in the blocklist or not. Ads inside apps are hard to block (I even have adaway on my android, and some slip through as eg Instagram reuses the backend domains/endpoints for ad delivery).
I personally stepped away from compose. You mentioned that you want a more declarative setup. Give Ansible a try. It is primarily for config management, but you can easily deploy containerized apps and correlate configs, hosts etc.
I usually write roles for some more specialized setups like my HTTP reverse proxy, the arrs etc. Then I keep everything in my inventory and var files. I’m really happy and I really can tear things down and rebuild quickly. One thing to point out is that the compose module for Ansible is basically unusable. I use the docker container module instead. Works well so far and it keeps my containers running without restarting them unnecessarily.
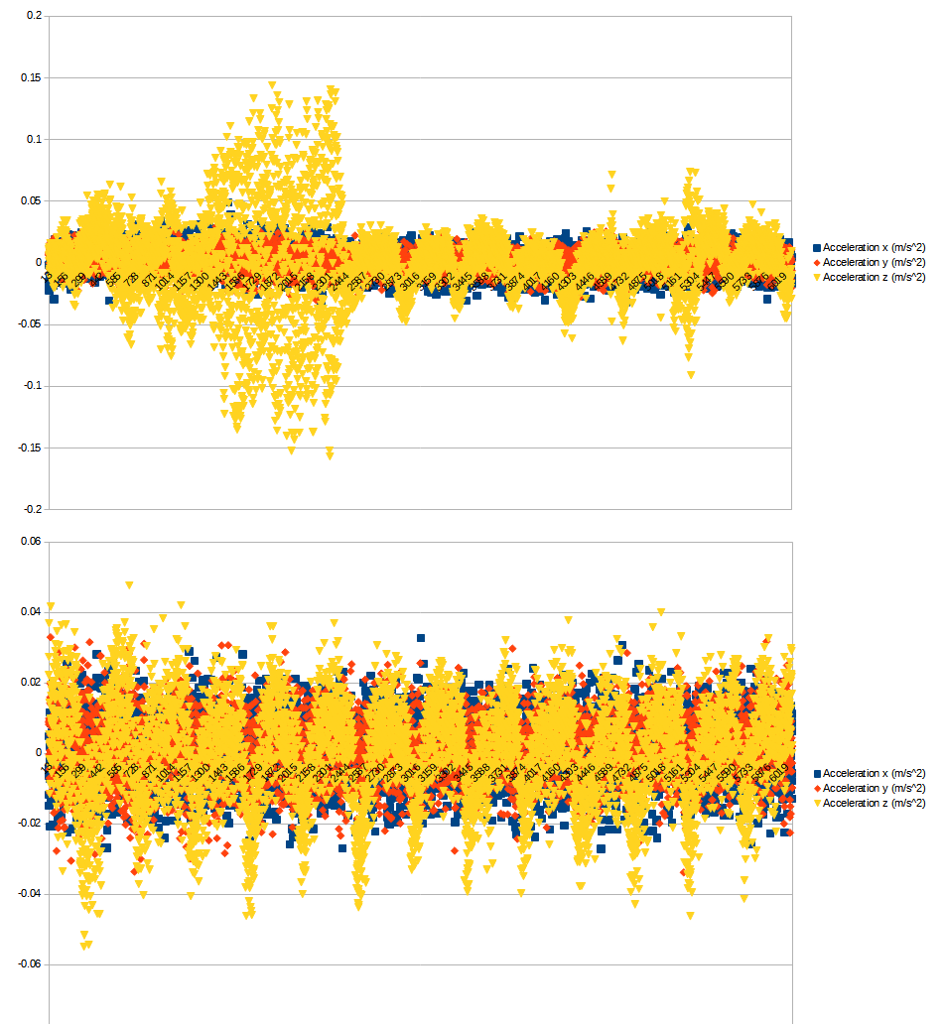
I’ve been a bit busy so I haven’t had the time to figure out what and how much I need to compensate so the sensor data is more useful. One of the sensors seems to be detecting something reminiscent of a sine curve, so this will involve some extra high school math to find a function to cancel it out. Busy dad etc, maybe next week. In the mean time I started putting together the case and ordered the springy subwoofer legs. Here is how a simple plot of the raw acceleration looks like.
It’s obvious which one is the before and after. The second one even includes two trains arriving back to back.
Now I need to figure out a few things:
I’m wondering, now that you’ve seen the app, do you have some practical advice on how to measure the difference without having to spend a few hours researching and refreshing on high school physics? It seems that my only option is to run the “Acceleration without g” experiment and work on the csv export.
A probably naive approach would be to filter out values below a certain threshold (a ‘low pass filter’ of sorts to deal with a noisy sensor) and then try to meaningfully sum the acceleration by time period. But just as I wrote this I realized that I can’t simply sum a few values from several rows and call it a day.
The article you linked explained the idea behind the pseudo velocity well, I’m wondering if I can… “sum the area” (assuming interpolated data) under the various measurement points. Without completely nerding out and investing too much time :D My sensor seems to have a rate of 200Hz, so it should be good for measuring vibrations up to 100Hz.
Edit, it’s integrals, right? This is actually exciting, haven’t touched math since university.
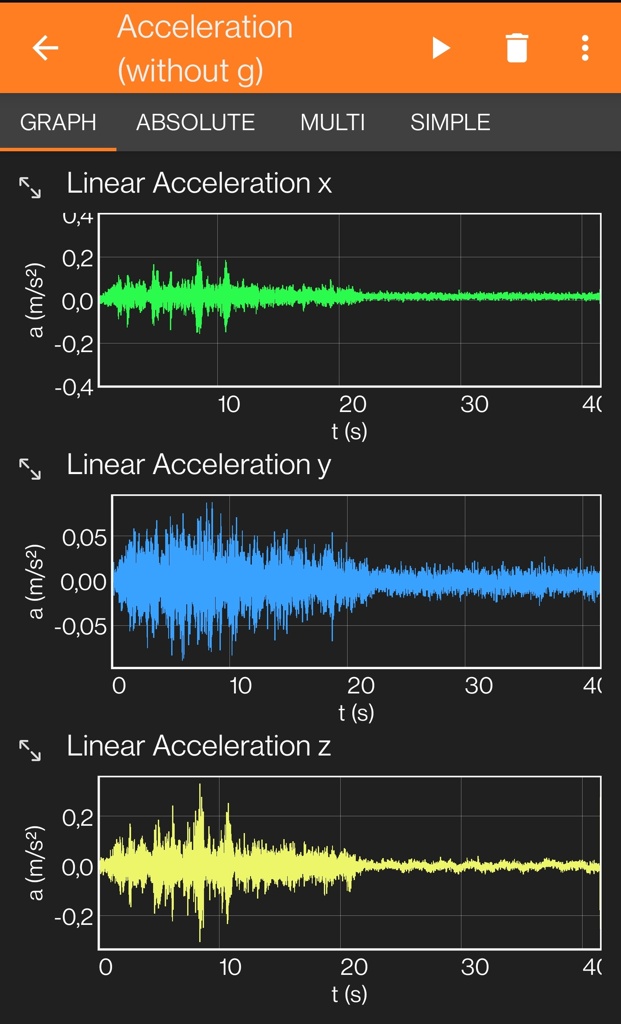
Also here’s an example of how the acceleration graph looks like when the phone is on the heating / radiator (more or less worst case):
I have 3 Intel S3700’s, one for the OS and two 400GB ones for a mirror pool (might do a raidz1 as well). But getting anything in a serious capacity (8-12 TB of usable storage) with datacenter SSDs is really expensive. :(
Can you elaborate on “the right kind”, do you mean the NAS grade ssd’s?
Awesome, thank you for taking the time to include so many details. I can see myself easily building the aforementioned plywood+foam sandwich platform, sounds like a more solid platform to put the NAS case on (mid tower).
The subwoofer feet also look fun, I remember reading about them back in the reddit days. After revisiting my notes and the post, there were some concerns about harmonic vibrations and oscillations from the drive having an negative impact. But reading it again, I don’t think that this will be a problem.
I think I’ll start with the feet and see how they perform while I source the plywood and foam. Maybe there are also some foam / rubber mounts for the disks themselves, I should be able to find suitable one as it’s a more common problem to have.
Do you have recommendations for how I should best measure the results? Preciously I looked into the raw acceleration data to see how strong the vibrations are, and then I looked into the spectrum to find the vibration frequencies. All with consumer / noob friendly tools (phyphox), hoping that the change will be measurable and the results - meaningful.
Do you have any recommendations or good to go config for openvpn+android? I used my regular setup / config and somehow the VPN client I used didn’t like it. I am not sure if it’s that (there are some legacy / unsupported config settings which never clients don’t tend to support) or I messed up somehow.
Anyway, I would be grateful for some pointers or a link on setting up the client and server config correctly.
Just in case you missed this, you can issue valid HTTPS Certificates with the DNS challenge. I use LetsEncrypt, DeSEC and Traefik, but any other supported provider with Lego (CLI) would work.